Thesis Concept
As robotic labor becomes more prevalent it is only a matter of time before it becomes a convention of architecture and construction. However, with the progression of robotic capabilities a disconnect in architectural design is forming. After years of questioning how ‘could’ architecture be relayed through scripted toolpaths and robotic printing, designers leading the crusade for this next advance in architecture technology seem to be ignoring the question how ‘should’ architecture be relayed through robotics. Many architects working on the development of robotic-built design have only considered the use of their strategies on theoretical environments and controlled installations. Few, if any, have considered the implications and design possibilities of introducing robotic construction to the practical environment.
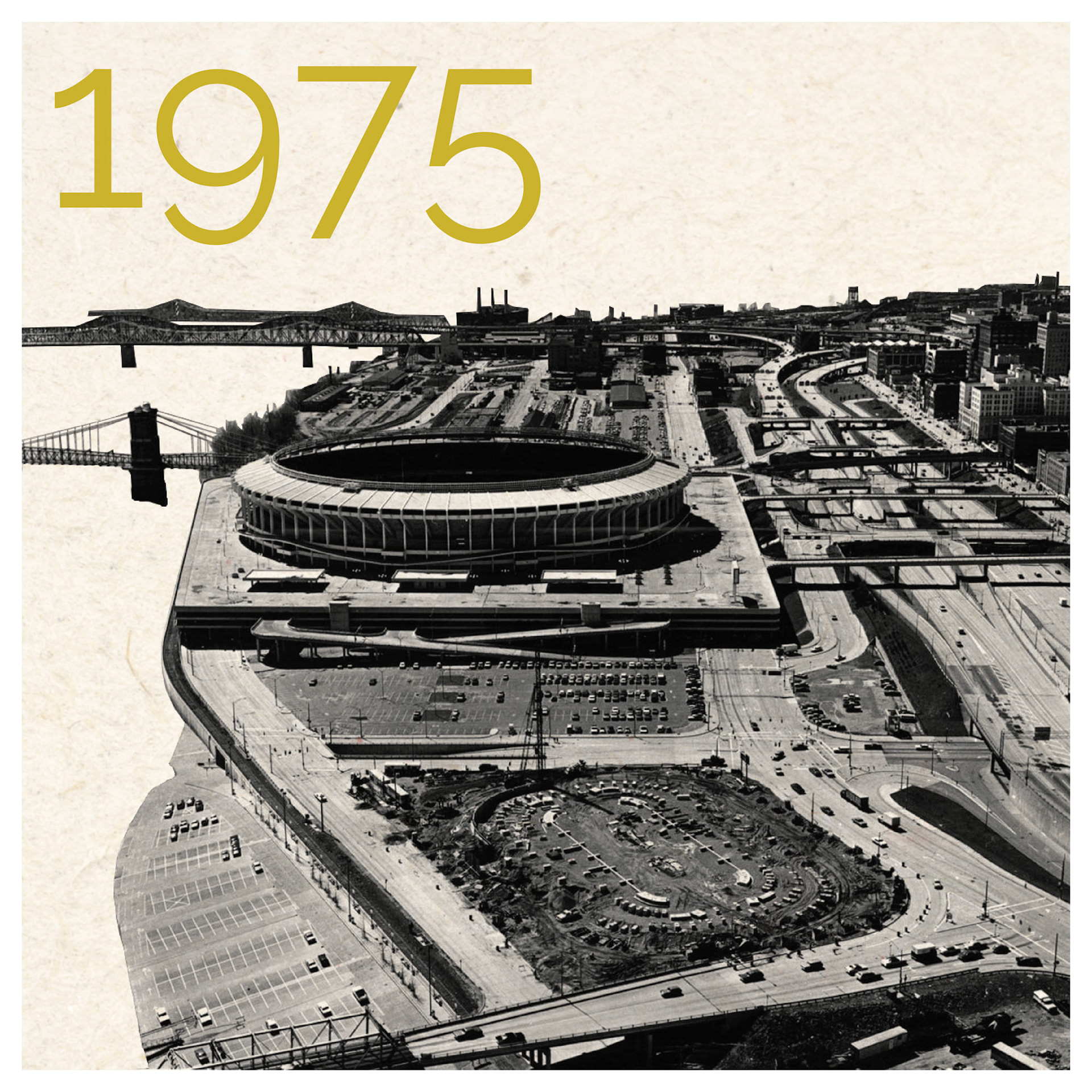


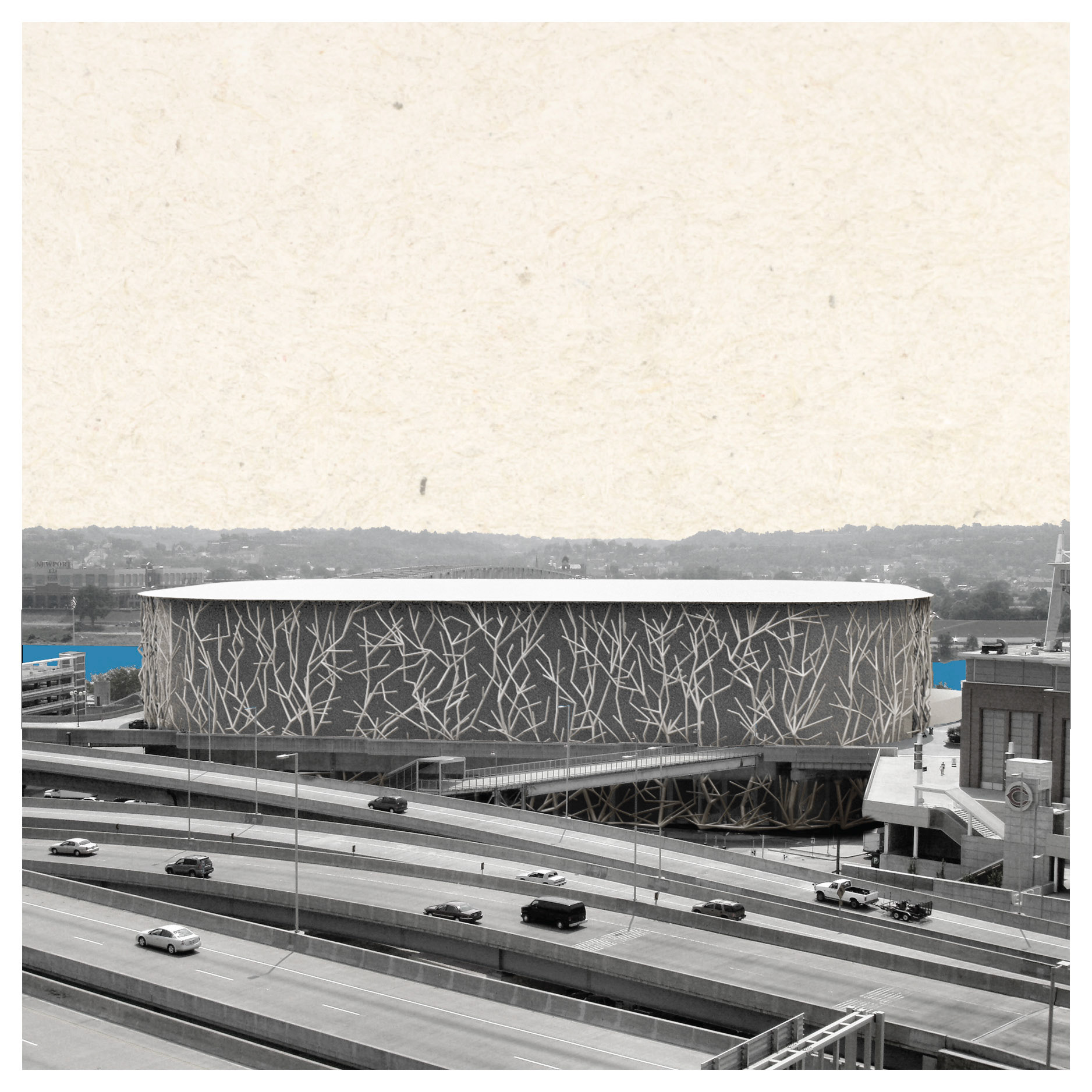
Site Selection
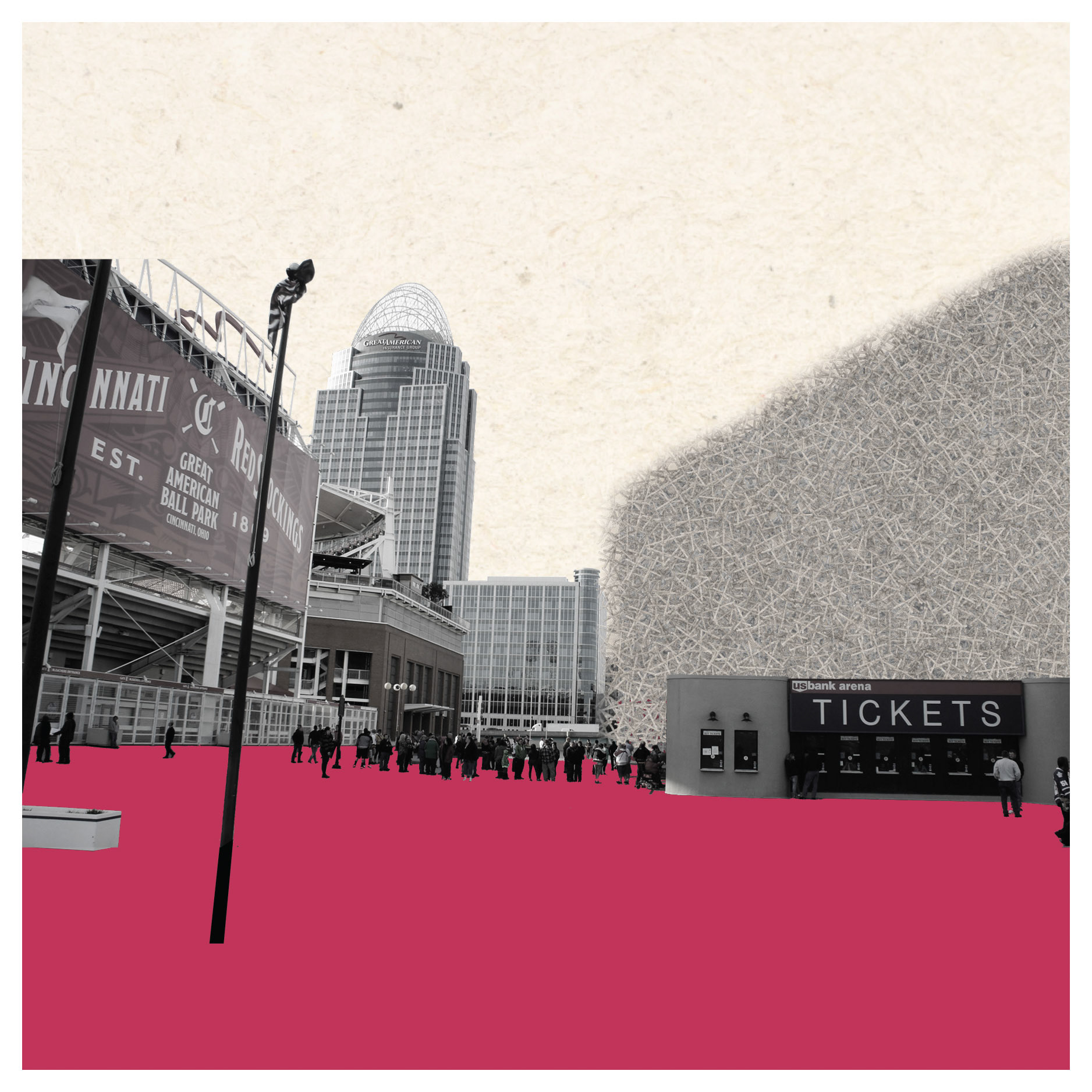
Given my experience in venue design I know that often the scale and funding of these projects allow for the implementation of new aspects of design and technology. This knowledge in addition to my personal observation of the often forgotten bookend of the Cincinnati Riverfront, Heritage Bank Center, lead me to choosing the site as a way to showcase the capabilities of robotic construction but also integrate the arena into the rest of the flourishing district.


Initial Concept
The concept of my thesis was sparked from the idea that, much like we don't expect other animals to approach construction in the same way as humans, neither should robotic construction replicate the human process
Initial Research
Researching multiple types of non-human construction, I focused on the building blocks that were used in the foundation of each building technique. I then scripted a way of replicating all these processes, but in a way that could be applied to any 3D form. The animations above showcase how both the natural and scripted forms are based on the same principles.
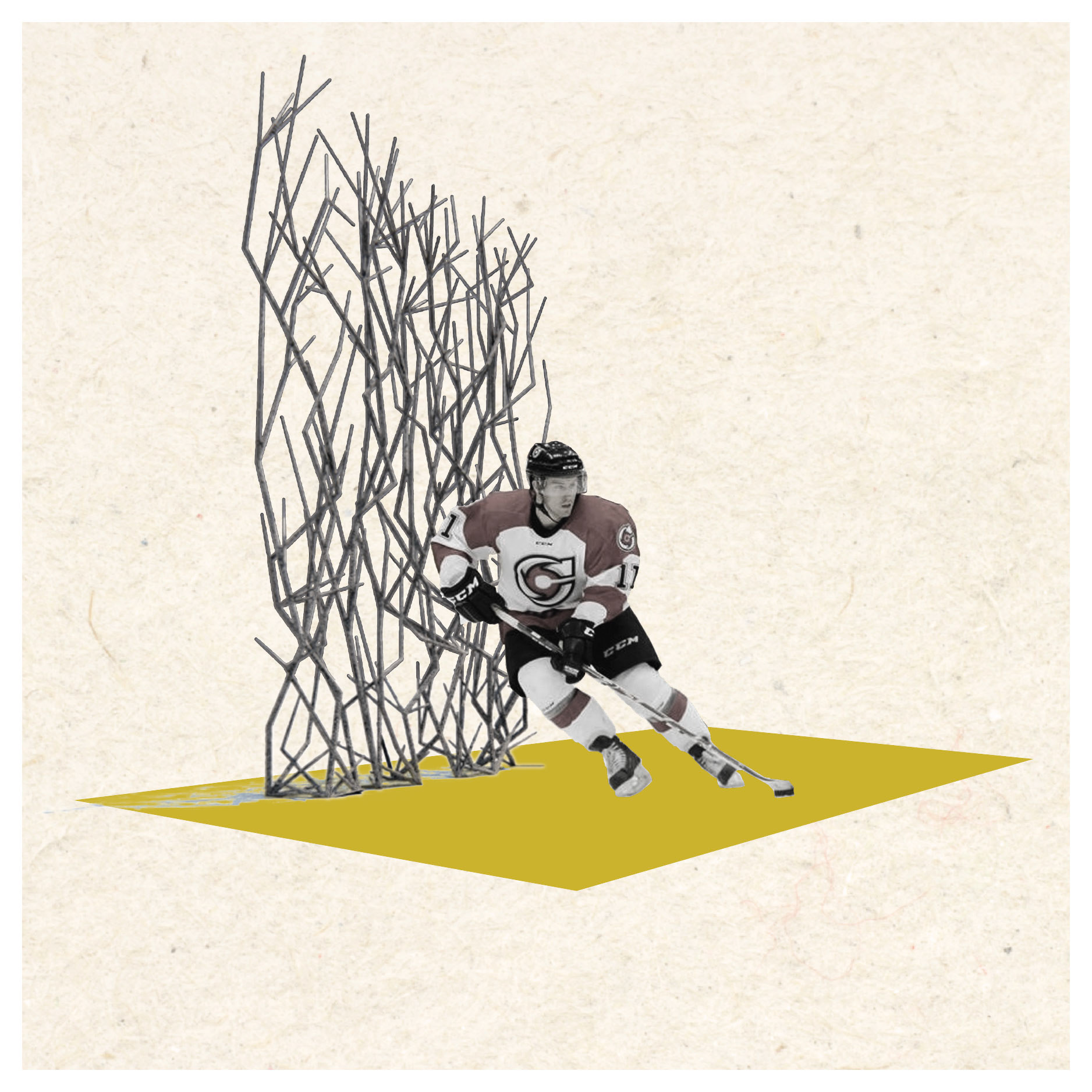
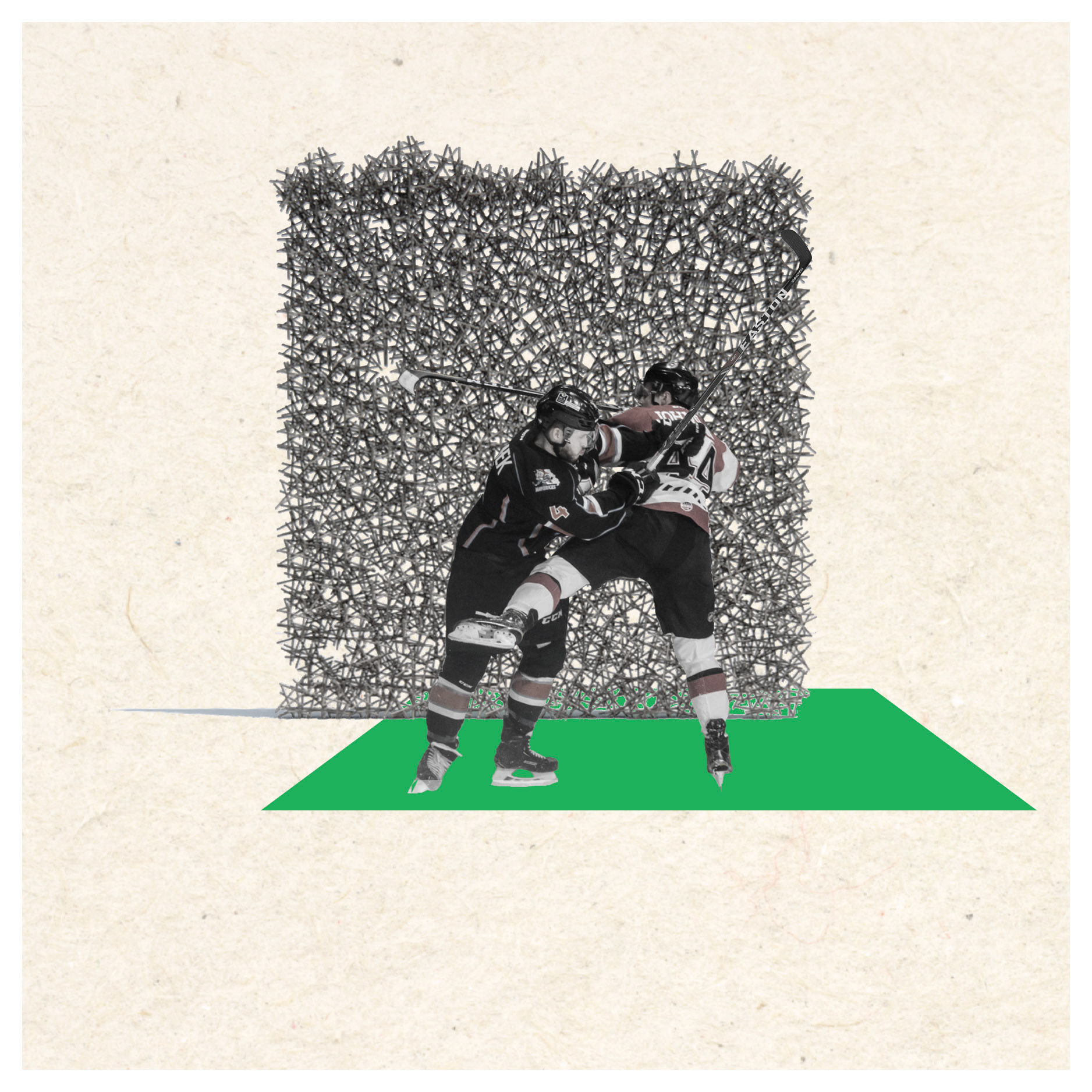
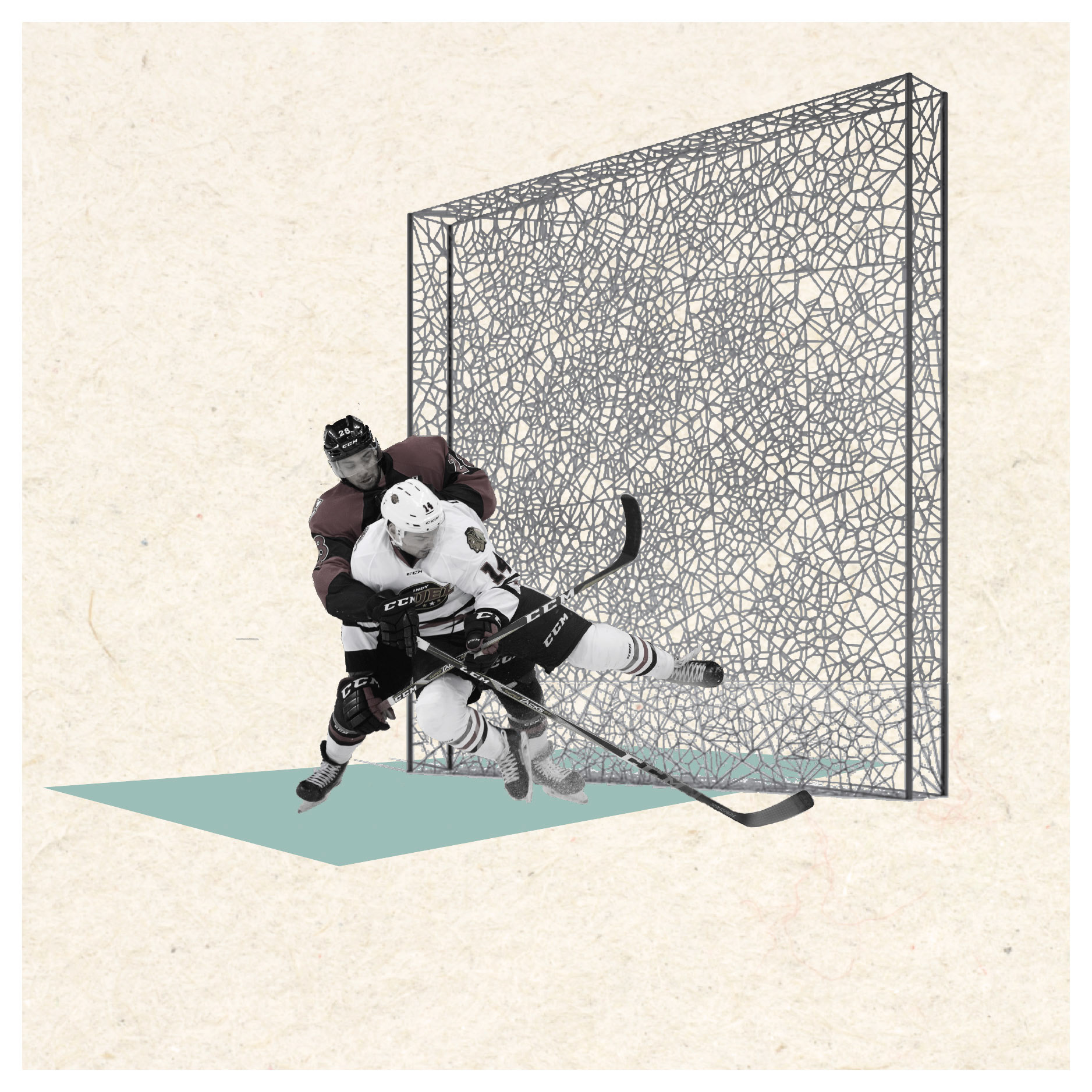
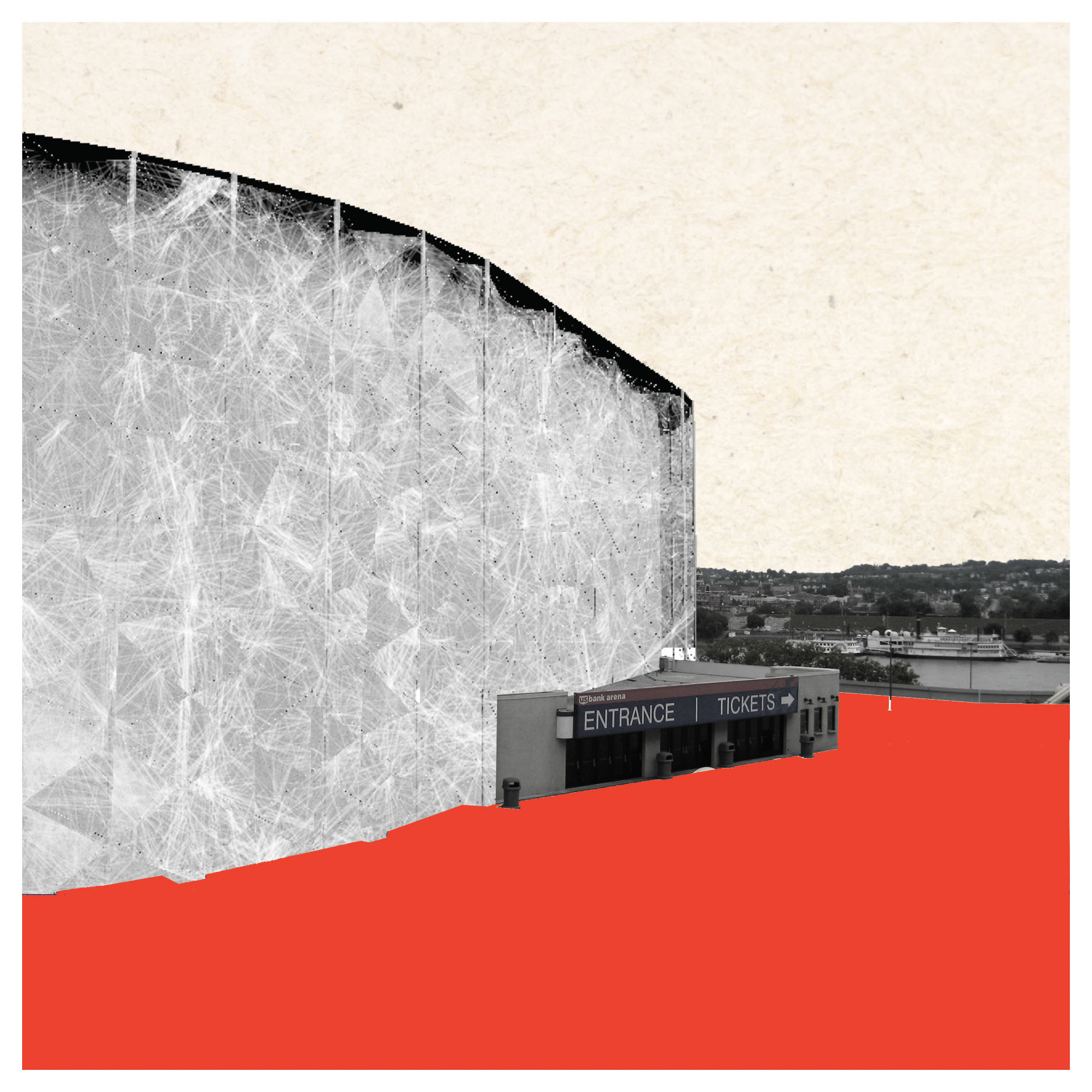
Once fully understanding how the scripted construction techniques could be applied in a limited environment, I began looking at how they could be applied to less ambiguous forms at a larger scale.
The conclusion I came to after this stage of development was that, while these techniques are intriguing in appearance, they fall into the same pitfall as human construction when replicated by robotics, it is still a machine trying to mimic an entity with completely different strengths and weaknesses.